Naše sonda v sobotu 03.09.2011 v 9:42 odstartovala a přinesla chvíle euforie, napětí, radosti a nadšení.
Celý let proběhl naprosto hladce, bez jediného zaváhání. Nemohli jsme si přát více. Prostě jsme to dokázali!
Our first flight was just astonishing! I have to watch it again and again
Maximum altitude: 31km
Location: Czech Republic
Jsme maximálně nadšeni! Všechny data zpracováváme a budeme je zveřejňovat na adrese výše.
Poděkování
Za tým czANSO chceme velmi poděkovat panu Horáčkovi z HWKitchen, který nám věřil i když plán byl teprve na začátku, a poskytl nám 2 komponenty pro náš letový hardware. Děkujeme!
Dále chceme poděkovat velké spoustě lidí, kteří přispěli do našeho společného rozpočtu a pomohli tak uskutečnit tento krásný let.
A v neposlední řadě také všem, kteří nám fandili, podporovali nás, poskytli rady nebo nápady a vydrželi až do závěru. Myslím, že to stálo za to.
Je na čase poskladát všechny komponenty do našeho boxu. Přemýšlel jsem, jak upevnit foťák a jak utěsnit pohyblivý objektiv tak, aby mráz panující ve stratosféře nepronikl do boxu.
Tento problém jsem vyřešil tak, že celý objektiv je schovaný v plastové trubičce, která je pevně a neprodyšně přilepena k tělu foťáku, viz:
<a href=”http://www.flickr.com/photos/pavelrichter/5862237097/” title=”Final assembly czANSO payload I. by Pavel Richter, on Flickr”><img src=”http://farm3.static.flickr.com/2727/5862237097_70100b6dd4_z.jpg” width=”427″ height=”640″ alt=”Final assembly czANSO payload I.”></a>
Do stěny payload boxu jsem pak vyvrtal díru o stejném průměru tak, aby byl otvor utěsněn samotnou trubičkou:
Ještě pohled shora. Foťák a jeho baterie 2 x 2 baterie. Externí napájení a ochranný kryt u spouště.
Při jednání o povolení ke startu s Úřadem pro civilní letectví mne napadlo umístit na balon modul optické a zvukové signalizace, který by
1) mohl upozornit případně se vyskytující osoby v místě dopadu
2) mohl by nám pomoci při hledání boxu po dopadu – vysoká tráva, pole, les apod.
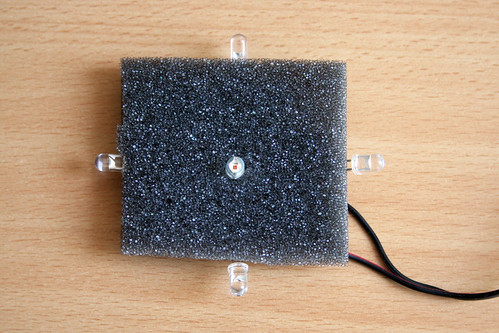
Modul optické výstrahy bude umístěn ve spodní části a bude aktivován před dopadem spolu se zvukovou výstrahou (buzzer, 85dB).
Obsahuje 5 vysoce svítivých LED (o intenzitě 3000-12000mcd) ve všech směrech.
Prototyp:
Celková proudová zátěž při plném svitu je cca 100mA. Protože LED budou blikat, bude efektivní hodnota spotřeby cca 50mA.
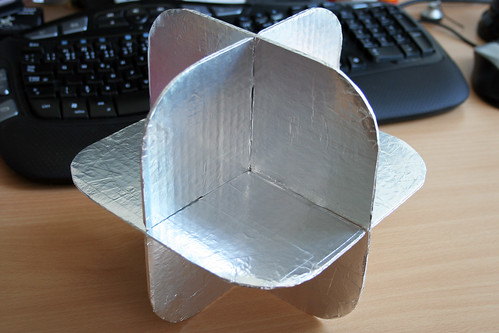
Radar Reflector
Tato komponenta má za úkol odrážet přicházející signály – je to tedy signálový odražeč. Tvoří ji 3 navzájem kolmé plochy, které zajišťují, že signál se odrazí ve stejné směru, ze kterého přišel. O citlivosti palubních radarů letadel jsem se sice nedočetl, ale myslím, že bude dobré radar reflektor do projektu zařadit.
Princip fungování:
Toto je druhá verze radar reflektoru a myslím že to je verze konečná. Váží 66g a je vyrobena ze čtverců o hraně 20cm. Plocha je pokryta ALU páskou.
Martin provedl další testy odpojovacího zařízení a zdokumentoval výrobu:
Video a obrázky ze zkoušky hoření v -35 °C (zchlazeno v tekutém propanbutanu):
Finální zařízení se chová předvídatelně:
délka hoření 2 s s ostrým náběhem i vyhasnutím
žádný zbytkový hoření, tah je malý a konstantní
je lehké (15 g)
funguje i ve vlhku (palník je glazurovaný) i v mrazu
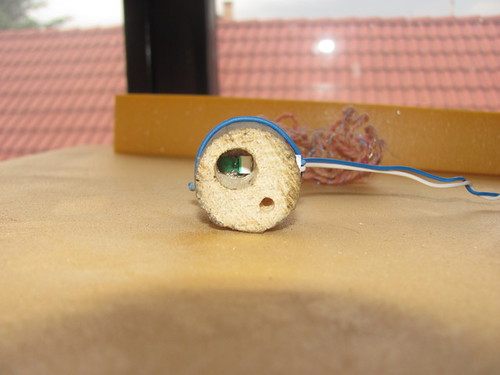
výroba je jednoduchá a levná:
Do drobné kulatiny se navrtají potřebné otvory.
Připraví se miniaturní množství paliva.
Nalisuje se do kulatinky.
Do tlustší kolmé díry natlačíme elektrický palníček a drátem ho přivážeme.
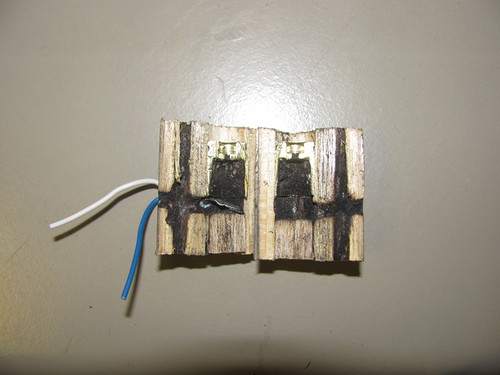
A zde se můžete podívat na zařízení v akci. Krátké, jednoduché a efektivní.
Po testu jsme celé zařízení rozřízli, aby bylo jasně vidět, co se tam událo: palníček zapálí maličké množství paliva a horké plyny vyletí otvorem, kde jim v cestě stojí spojovací lanko, které je tím přerušeno.
Dříve v článku Bezpečnostní cut-down zařízení jsem vysvětlil, proč je nutné mít zařízení na odpojení balonu.
Po několika testech se ukázalo, že odpojení balonu žhavícím drátkem je náchylné k selhání – drátek musí být optimálně napnutý, aby se prořezal vodícím lankem, může se při vysoké teplotě přetavit sám a tím rozpojit obvod apod.
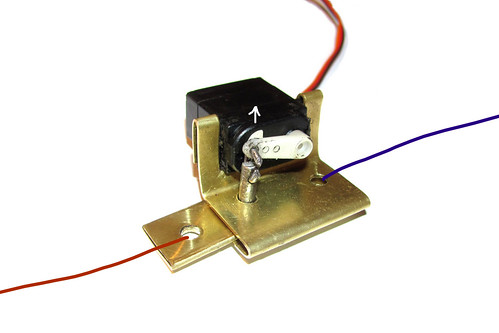
Rozhodli jsme se tento systém odpojení nahradit systémem mechanickým – servomotorkem.
Elektrickým impuzem z řídící elektroniky Seeeduina se spustí mechanický pohyb, který vykoná potřebnou operaci odpojení – v našem případě vytažení spojovacího čepu a tím uvolnění lanka.
Zde je krátká ukázka na videu:
Rozpojení lanka servem je jednoduché a nenáročné, postačí PWM signál, napájení 5-12V a zem GND.
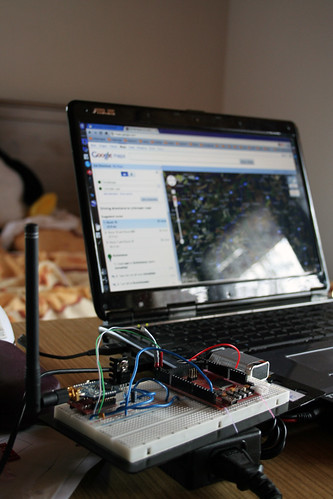
Nejprve jsem vyrazil do Kladna za Martinem, kde jsme udělali menší poradu a nezbytné testy.
Poprvé jsme vyzkoušeli naši Yagi anténu ve spojení s XBee-PRO modulem a na několik desítek metrů zkušebně přijali data z payloadu. Poté jsme také připravili ground station, který bude přijímat data vyslaná z payload boxu.
Pro long range testování (tedy vzdálenost 20 a více km) jsme hledali vhodná vyvýšená místa v rámci Čech tak, aby mezi pozemní stanicí a payload boxem existovala ideálně přímá viditelnost.
Prohlédli jsme nějaké rozhledny, kopce a nakonec jsem se rozhodl pro horu Říp, konkrétně Mělnickou a Pražskou vyhlídku hory Říp.
Zde se můžete podívat na výhled i vy: Říp – panorama z vyhlídky.
Cesta k Řípu se poměrně protahla vzhledem k objížďkám, ale nakonec jsme se k němu dostali a pozemní tým se přesunul na vyhlídku a založil stanoviště.
Já (Pavel) jsem vzal payload box do auta, zapnul foťák s automatickým CHDK skriptem a vyjel směrem na Mělník, kde jsem udělali první test přenosu. Payload box vysílal svoji polohu, počet viditelných satelitů a teplotu uvnitř boxu.
Zde byla první zastávka (v pozadí je vidět hora Říp) – vzdálenost cca 10km. Test byl úspěšný, datové pakety byly vyslány a přijaty.
Následující fotografie a video je z fotoaparátu v boxu, na kterém běžel náš CHDK skript:
(rušení zvuku je pravděpodobně způsobeno vysíláním XBee modulu)
Poté jsem pokračoval směrem k Neratovicím, kde jsem se ztratil z linie přímé viditelnosti. Přenos sice zaznamenával výpadky, ale datové pakety stále přicházely. Pokračoval jsem až k obci Předboj (z Řípu je vidět pouze špička):
Nejdelší spojení jsme provedli na 23+km, ale nyní je jasné, že to půjde mnohem dál. Den se chýlil ke konci, Slunce již zapadalo a tak jsme test ukončili s dobrými výsledky.
Pro účely sledování balonu jsem vytvořil czANSO Mission Track Tool, kde jsou 3 dílčí testy a k nim export do mapy (odkazem vygeneruj KML). Fotoaparát Canon A470 s CHDK skriptem, běžel skvěle až do vybití baterií a vzniklo 1.2GB dat.
Při propočítávání sestupové rychlosti našeho nákladu se ukázalo, že náš původně zamýšlený padák bude lépe nahradit větším a odolnějším kolegou.
Prohledal jsem svoje zápisky ze začátku analýzy a našel jsem obchod, který jsem si poznamenal. Jsou to stránky Rocketman’s Online Store. Tato společnost se specializuje na padáky, které dodávají většinou raketovým modelářům. A některé jsou opravdu obrovské…
Huge Rocketman Parachute - ukázka
Emailem jsem zjistil dostupnost a vybral jsem 5 stop velký padák.
Z jejich tabulky sestupových rychlostí je viditelné, že pro velikost 5 feet (cca 150 cm) a při zatížení 5.7lb (cca 2600 gramů) je sestupová rychlost 17.67 ft/s, což je po přepočtu 5.38m/s.
WEIGHT
FT/SEC.
MPH.
WEIGHT
FT/SEC.
MPH.
3FT.
1.7lb
15.95
10.87
2.1lb.
17.9
12.2
4FT.
3.0lb
15.95
10.87
3.7lb.
17.83
12.15
5FT.
4.7lb
15.63
10.6
5.7lb.
17.67
12.04
O 14 dní později padák dorazil a musím říci, že vypadá vážně skvěle.
 Latest Entry
Latest Entry