Další testy odpojení balonu
May 20, 2011 Komponenty balónu, Testování
Martin provedl další testy odpojovacího zařízení a zdokumentoval výrobu:
Video a obrázky ze zkoušky hoření v -35 °C (zchlazeno v tekutém propanbutanu):

Finální zařízení se chová předvídatelně:
- délka hoření 2 s s ostrým náběhem i vyhasnutím
- žádný zbytkový hoření, tah je malý a konstantní
- je lehké (15 g)
- funguje i ve vlhku (palník je glazurovaný) i v mrazu
- výroba je jednoduchá a levná:
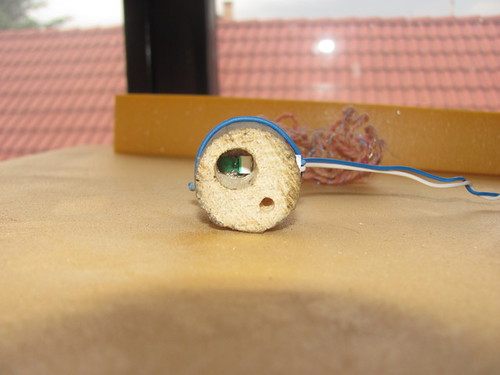
Do drobné kulatiny se navrtají potřebné otvory.

Připraví se miniaturní množství paliva.

Nalisuje se do kulatinky.

Do tlustší kolmé díry natlačíme elektrický palníček a drátem ho přivážeme.
A zde se můžete podívat na zařízení v akci. Krátké, jednoduché a efektivní.
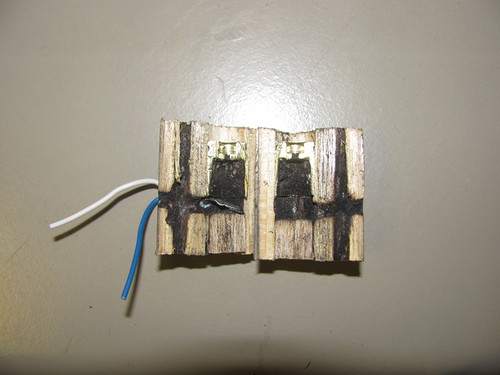
Po testu jsme celé zařízení rozřízli, aby bylo jasně vidět, co se tam událo: palníček zapálí maličké množství paliva a horké plyny vyletí otvorem, kde jim v cestě stojí spojovací lanko, které je tím přerušeno.
Odpojení balonu servem
May 1, 2011 Komponenty balónu, Testování
Dříve v článku Bezpečnostní cut-down zařízení jsem vysvětlil, proč je nutné mít zařízení na odpojení balonu.
Po několika testech se ukázalo, že odpojení balonu žhavícím drátkem je náchylné k selhání – drátek musí být optimálně napnutý, aby se prořezal vodícím lankem, může se při vysoké teplotě přetavit sám a tím rozpojit obvod apod.
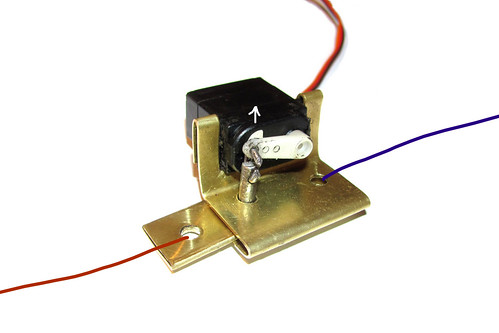
Rozhodli jsme se tento systém odpojení nahradit systémem mechanickým – servomotorkem.
Elektrickým impuzem z řídící elektroniky Seeeduina se spustí mechanický pohyb, který vykoná potřebnou operaci odpojení – v našem případě vytažení spojovacího čepu a tím uvolnění lanka.
Zde je krátká ukázka na videu:
Rozpojení lanka servem je jednoduché a nenáročné, postačí PWM signál, napájení 5-12V a zem GND.
Testování na Řípu
Apr 17, 2011 Software, Testování
Testovací den proběhl v sobotu 16.dubna 2011.
Nejprve jsem vyrazil do Kladna za Martinem, kde jsme udělali menší poradu a nezbytné testy.
Poprvé jsme vyzkoušeli naši Yagi anténu ve spojení s XBee-PRO modulem a na několik desítek metrů zkušebně přijali data z payloadu. Poté jsme také připravili ground station, který bude přijímat data vyslaná z payload boxu.

Pro long range testování (tedy vzdálenost 20 a více km) jsme hledali vhodná vyvýšená místa v rámci Čech tak, aby mezi pozemní stanicí a payload boxem existovala ideálně přímá viditelnost.
Prohlédli jsme nějaké rozhledny, kopce a nakonec jsem se rozhodl pro horu Říp, konkrétně Mělnickou a Pražskou vyhlídku hory Říp.
Zde se můžete podívat na výhled i vy: Říp – panorama z vyhlídky.
Cesta k Řípu se poměrně protahla vzhledem k objížďkám, ale nakonec jsme se k němu dostali a pozemní tým se přesunul na vyhlídku a založil stanoviště.



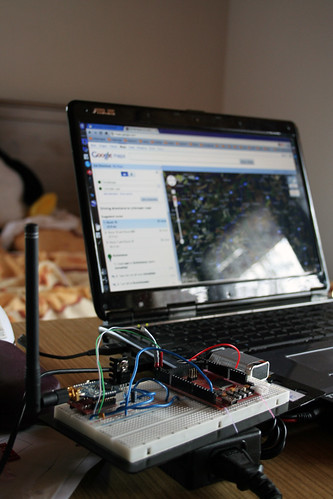
Já (Pavel) jsem vzal payload box do auta, zapnul foťák s automatickým CHDK skriptem a vyjel směrem na Mělník, kde jsem udělali první test přenosu. Payload box vysílal svoji polohu, počet viditelných satelitů a teplotu uvnitř boxu.
Zde byla první zastávka (v pozadí je vidět hora Říp) – vzdálenost cca 10km. Test byl úspěšný, datové pakety byly vyslány a přijaty.

Následující fotografie a video je z fotoaparátu v boxu, na kterém běžel náš CHDK skript:

(rušení zvuku je pravděpodobně způsobeno vysíláním XBee modulu)
czANSO video test from payload from Pavel Richter on Vimeo.
Poté jsem pokračoval směrem k Neratovicím, kde jsem se ztratil z linie přímé viditelnosti. Přenos sice zaznamenával výpadky, ale datové pakety stále přicházely. Pokračoval jsem až k obci Předboj (z Řípu je vidět pouze špička):

Nejdelší spojení jsme provedli na 23+km, ale nyní je jasné, že to půjde mnohem dál. Den se chýlil ke konci, Slunce již zapadalo a tak jsme test ukončili s dobrými výsledky.
Pro účely sledování balonu jsem vytvořil czANSO Mission Track Tool, kde jsou 3 dílčí testy a k nim export do mapy (odkazem vygeneruj KML). Fotoaparát Canon A470 s CHDK skriptem, běžel skvěle až do vybití baterií a vzniklo 1.2GB dat.
Tags: 25km, anténa, canon, chdk, ground station, KML, long range, payload, test, Testování, tracker, xbee, yagi
Predikce trajektorie balonu
Jan 30, 2011 Software, Testování
Při analýze dostupných nástrojů jsem narazil na nástroj CUSF (Cambridge University Spaceflight landing predictor), který byl vyvinut speciálně pro předpověď trajektorie a místa přistání meteorologických sondážních balónů.
Tento nástroj je publikován jako otevřený a svobodný software pod licencí GNU General Public License. Je provozován na adrese: http://habhub.org/predict
Model využívá dat z globálního numerického předpovědního systému GFS, Global Forecast systém, který je provozován americkou vědeckou agenturou NOAA, National Oceanic and Atmospheric Administration, a je spouštěn 4x denně (00 UTC, 06 UTC, 12 UTC, a 18 UTC).
Dokáže produkovat data s rozlišením 0.5 stupně (zem. šířky / délky), ve vertikálním rozlišení 64 úrovní. Aplikace CUSF tyto data umí na základě zadaných parametrů (dostup, rychlost stoupání, pozice startu atd. ) zpracovat a zobrazit na mapě predikovanou trajektorii.

CUSF Predict Tool
Aplikace nabídne ke stažení i KML soubor, který lze otevřít pomocí Google Earth, kde najdeme i výškový profil a další.
Úspěšnost předpovědi počasí na období 3 dnů se pohybuje na úrovni 85%. Delší předpověď má vyrazně nižší úspěšnost s každým dalším dnem. Start balonu nelze s ohledem na tuto skutečnost plánovat dlouhodobě dopředu.
S tím souvisí i místo startu, které bude také pravděpodobně upraveno s ohledem na předpověď počasí, zejména směr a sílu větru. Samozřejmě bude určeno mimo letecké zóny CTR, dangerous zóny (LK D1 – LK D7), prohibited zóny (LK P1 – LK P12) a restricted zóny (LK R1 – LK R14).
Zde je pohled na rozdělení vzdušného prostoru ČR:

Vzdušné prostory ČR
Tutu mapu naleznete ve formátu KMZ na adrese: http://www.lloydbailey.net/airspace.html, kde vyberte Czech Republic a otevřete KMZ soubor.
Jsou tam všechny restricted (TRA), prohibited i danger areas (Temelín, Dukovany atd.) i letové CTA/CTR, TMA včetně vertikálních hranic FL.
Před startem se samozřejmě budeme zajímat i o lokální předpověď počasí, například pomocí modelu ALADIN.
Tags: aladin, CTA, CTR, cusf, GFS, Google Earth, KML, KMZ, mapa, NOAA, predict, predikce, TMA, TRA, trajektorie
Když zlobí teploměry
Oct 11, 2010 Komponenty balónu, Testování
Při testech kompletního zapojení se ihned projevila zákeřná chyba. Celý systém se po několika vteřinách zdánlivě vypnul, procesor přestal komunikovat atd.
Odpojováním jednotlivých části jsem přišel na to, že chybu způsobují teploměry a bez nich systém běží standardně. Jak jsem psal v článku o teploměrech DS18B20, teploměr může být napájen parazitně nebo aktivně.
Pro finální zapojení jsem teploměry zapojil v režimu aktivního napájení, přesně podle datasheetu, pro ilustraci jsem nalezl obrázek:

DS18B20 - aktivní napájení
Z neznámého důvodu toto zapojení (které jsem 5x pečlivě zkontroloval) nefunguje tak, jak má. Prostě způsobí pád systému.
Několik hodin jsem nad tím koumal, vyměnil čidlo i odpor, různá napětí a různé vstupy, nic.
Problém jsem nevyřešil a tak jsem se vrátil k parazitnímu napájení, které jsem použil jako první po zakoupení čidla.

DS18B20 - parazitní napájení
Propojeno!
Oct 9, 2010 Komponenty balónu, Testování
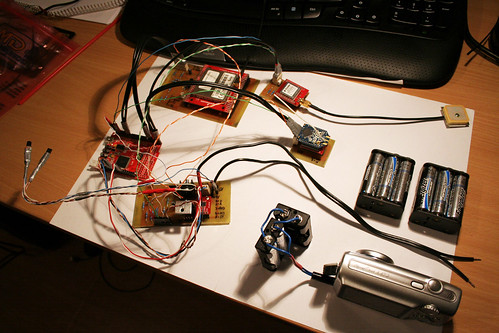
Jakmile jsem osadil moduly, přišla na řadu výroba datových a napájecích kabelů.
Elektronika czANSO je tak vyrobena a propojena. Nyní se vše otestuje jako celek a usadí do termoboxu:
Máme baterie, spoustu baterií
Sep 11, 2010 Komponenty balónu, Testování
Objednal jsem 32 kusů baterií Energizer Ultimate Lithium L91.
2x sada po 12ks – jedna sada pro generální zkoušku, jedna sada pro ostrý let
2x sada po 4ks – jedna sada pro napájení fotoaparátu, jedna sada pro cut-down záchrané zařízení
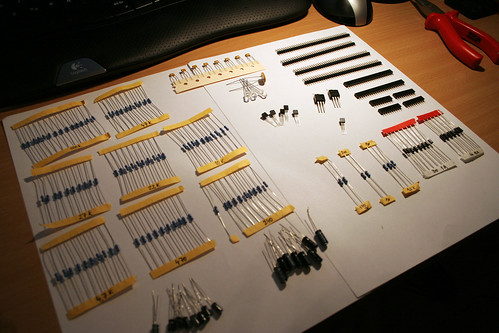
Balíček dorazil v pořádku:

32ks Energizer Ultimate Lithium L91
Tags: baterie, energizer, L91, ultimate lithium
Problém s příjmem pozice vyřešen
May 27, 2010 Komponenty balónu, Testování
První testy s GPS modulem nebyly bohužel úspěšné, ale problém se podařilo vyřešit.
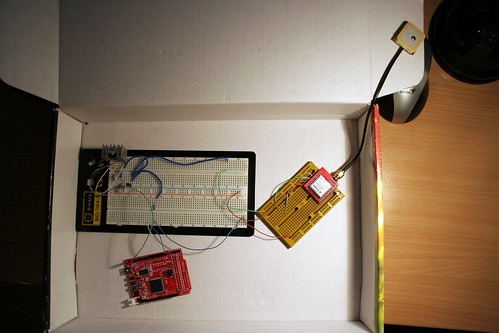
Celé zapojení jsem několikrát zkontroloval, ale fyzická chyba nebyla objevena. Proto jsem celé zařízení rozmontoval a umístil GPS modul na samostatnou desku, oddělil napájení, zařadil lepší filtrování výstupu ze stabilizátoru a použil co nejkratší drátové propojky.
Zapojení nyní vypadá následovně:
Nejprve se začali objevovat první viditelné satelity (01, 02):
$GPGGA,,,,,,0,01,,,,,,,*67 $GPVTG,,,,,,,,,N*30 $GPGGA,,,,,,0,02,,,,,,,*64 $GPVTG,,,,,,,,,N*30
Lepší výhled potom znamenal plný GPS fix a první platné poziční věty (pozici jsem odstranil, na místech podtržítek):
$GPGGA,223130.00,____._____,N,_____._____,E,1,05,2.80,00258,M,045,M,,*6A $GPVTG,310.6,T,310.3,M,000.4,N,000.8,K,A*2A
Tyto čísla znamenají:
- UTC čas – 22:31:30
- pozice
- 1 = platná pozice
- 5 viditelných satelitů
- nadmořská výška 258m
Ve druhé větě například:
- rychlost 000.8 km/h (nepřesnost, modul stál na místě)
Tags: antenna, copernicus, fix, gps, nmea, regulator, rušení, seeeduino, SMA
Měření teploty senzorem DS18B20
Apr 17, 2010 Komponenty balónu, Testování
Jakmile jsem vybral vhodné teplotní čidla, vrhnul jsem se na jejich praktické zapojení a otestování.
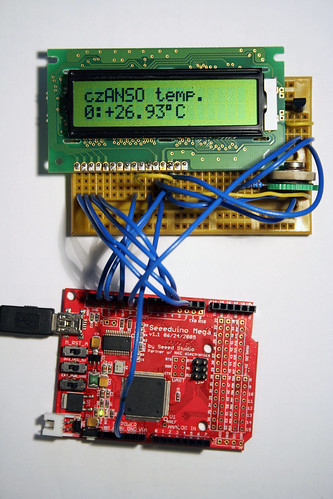
Ze zásob jsem vyhrabal i starý LCD displej 16×2, který několik let zobrazoval informace v mé počítačové skříni a napadlo mě změřenou teplotu ihned zobrazovat.
Teplotní čidlo Dallas DS18B20 umožňuje měření teploty za pomoci sběrnice 1-wire. Dokonce napájení čidla může zajišťovat přímo datový vodič. Při minimálním zapojení jsou tedy potřeba pouze 2 dráty – tomuto zapojení se říká parazitní napájení.
Zapojení a další důležité informace lze nalézt v datasheetu součástky. Napájení je v rozsahu 3 – 5.5V, takže není třeba zvláštní napájecí úroveň.
Moje zapojení včetně displeje vypadalo následovně:
Prototyp GSM modulu a první SMS
Apr 9, 2010 Komponenty balónu, Testování
Poté co dorazil první balíček komponent, začal jsem studovat datasheety GSM modulu GM862. Načrtnul jsem si základní schema a začal jej připravovat.
Nejprve jsem vyrazil do obchodu GM nakoupit nějaké diskrétní součástky, konektory, diody atd.
Desku GM862 Evaluation Board – Basic 50-Pin jsem opatřil konektory:
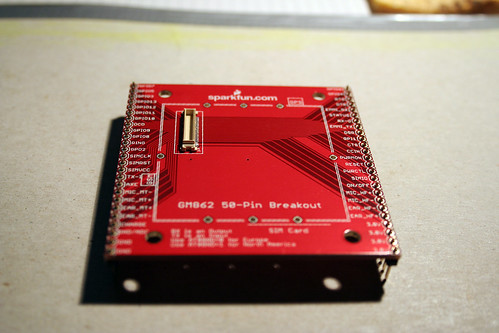
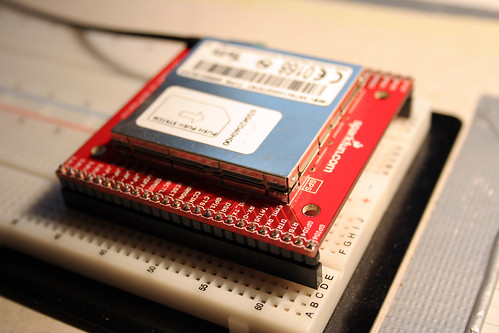
Opatrně jsem nasadil GSM/GPRS modul GM862 na titěrný konektor a připojil modul na nepájivé kontaktní pole, které využívám při vývoji prototypů.
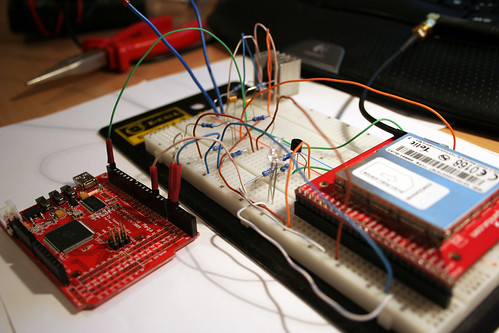
Dále bylo potřeba vyřešit napájení, protože GSM modul potřebuje ke svému provozu 3.4-4.2V. Zakoupil jsem tedy nastavitelný regulátor napětí, vypočítal hodnoty odporů a otestoval. Tento modul může ve špičkách odebírat proud až 2A, zdroj proto musí být schopný takovému požadavku vyhovět.
Poslední problém představovali rozdílné logické úrovně – Seeeduino má 5V TTL logiku a GSM modul 2.8V CMOS logiku. Zařadil jsem tedy dělící můstky a pull-up rezistory.
U mobilního operátora Vodafone jsem zakoupil předplacenou SIM kartu a vložil ji do modulu. Celkové sestavení vypadalo následovně:
Další den jsem pracoval na softwarové části a naštěstí jsem nalezl knihovnu, která z velké části uměla s modulem pracovat a posílam mu definované AT příkazy.
Je potřeba:
- inicializace modulu
- nastavení přenosové rychlosti
- zadání PIN kodu
- nastavení evropského kmitočtového pásma
- přihlášení do sítě
- odeslání SMS na zadané číslo
Po pár hodinách se věc podařila, modul se přihlásil do sítě a po mém příkazu odeslal první SMS na můj mobil. Prototyp je funkční. Ukázkové video je zde:
czANSO – GSM module GM862 works fine! from Pavel Richter on Vimeo.
Schema vytvořím později až budou hotové další moduly.


