Problém s příjmem pozice vyřešen
May 27, 2010 Komponenty balónu, Testování
První testy s GPS modulem nebyly bohužel úspěšné, ale problém se podařilo vyřešit.
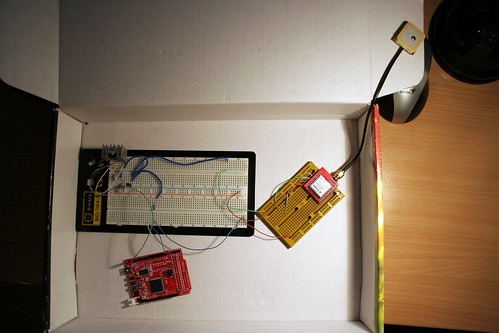
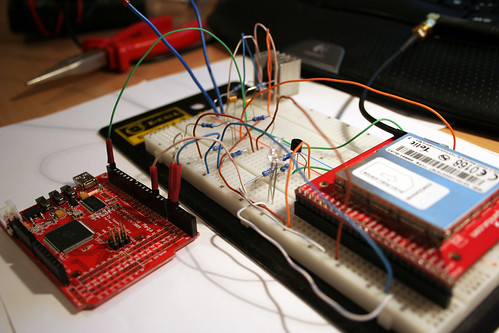
Celé zapojení jsem několikrát zkontroloval, ale fyzická chyba nebyla objevena. Proto jsem celé zařízení rozmontoval a umístil GPS modul na samostatnou desku, oddělil napájení, zařadil lepší filtrování výstupu ze stabilizátoru a použil co nejkratší drátové propojky.
Zapojení nyní vypadá následovně:
Nejprve se začali objevovat první viditelné satelity (01, 02):
$GPGGA,,,,,,0,01,,,,,,,*67 $GPVTG,,,,,,,,,N*30 $GPGGA,,,,,,0,02,,,,,,,*64 $GPVTG,,,,,,,,,N*30
Lepší výhled potom znamenal plný GPS fix a první platné poziční věty (pozici jsem odstranil, na místech podtržítek):
$GPGGA,223130.00,____._____,N,_____._____,E,1,05,2.80,00258,M,045,M,,*6A $GPVTG,310.6,T,310.3,M,000.4,N,000.8,K,A*2A
Tyto čísla znamenají:
- UTC čas – 22:31:30
- pozice
- 1 = platná pozice
- 5 viditelných satelitů
- nadmořská výška 258m
Ve druhé větě například:
- rychlost 000.8 km/h (nepřesnost, modul stál na místě)
Tags: antenna, copernicus, fix, gps, nmea, regulator, rušení, seeeduino, SMA
Prototyp GSM modulu a první SMS
Apr 9, 2010 Komponenty balónu, Testování
Poté co dorazil první balíček komponent, začal jsem studovat datasheety GSM modulu GM862. Načrtnul jsem si základní schema a začal jej připravovat.
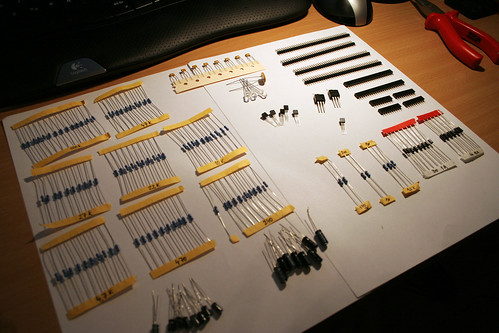
Nejprve jsem vyrazil do obchodu GM nakoupit nějaké diskrétní součástky, konektory, diody atd.
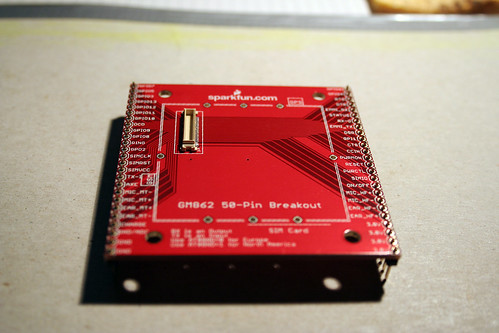
Desku GM862 Evaluation Board – Basic 50-Pin jsem opatřil konektory:
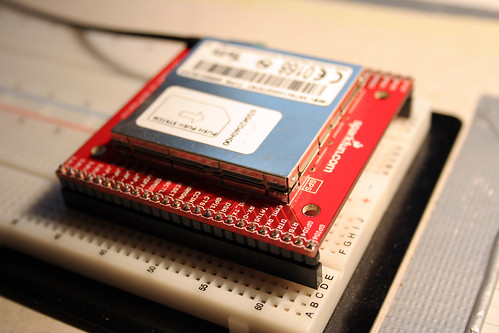
Opatrně jsem nasadil GSM/GPRS modul GM862 na titěrný konektor a připojil modul na nepájivé kontaktní pole, které využívám při vývoji prototypů.
Dále bylo potřeba vyřešit napájení, protože GSM modul potřebuje ke svému provozu 3.4-4.2V. Zakoupil jsem tedy nastavitelný regulátor napětí, vypočítal hodnoty odporů a otestoval. Tento modul může ve špičkách odebírat proud až 2A, zdroj proto musí být schopný takovému požadavku vyhovět.
Poslední problém představovali rozdílné logické úrovně – Seeeduino má 5V TTL logiku a GSM modul 2.8V CMOS logiku. Zařadil jsem tedy dělící můstky a pull-up rezistory.
U mobilního operátora Vodafone jsem zakoupil předplacenou SIM kartu a vložil ji do modulu. Celkové sestavení vypadalo následovně:
Další den jsem pracoval na softwarové části a naštěstí jsem nalezl knihovnu, která z velké části uměla s modulem pracovat a posílam mu definované AT příkazy.
Je potřeba:
- inicializace modulu
- nastavení přenosové rychlosti
- zadání PIN kodu
- nastavení evropského kmitočtového pásma
- přihlášení do sítě
- odeslání SMS na zadané číslo
Po pár hodinách se věc podařila, modul se přihlásil do sítě a po mém příkazu odeslal první SMS na můj mobil. Prototyp je funkční. Ukázkové video je zde:
czANSO – GSM module GM862 works fine! from Pavel Richter on Vimeo.
Schema vytvořím později až budou hotové další moduly.
Seeeduino žije a máme oficiální Flickr stream!
Apr 7, 2010 Komponenty balónu, Testování
Dostal jsem se konečně k otestování naší Seeeduino platformy. První prográmek je v podstatě Hello World, který pouze bliká LED diodou ![]() Celkem nuda, ale je dobré vědět, že žije.
Celkem nuda, ale je dobré vědět, že žije.
czANSO – Seeeduino Mega – First test from Pavel Richter on Vimeo.
Další poznámka se týká našich fotografií – založil jsem oficiální czANSO Flickr stream.
Flight control aneb mozek balónu
Feb 1, 2010 Komponenty balónu
Flight control je základní komponenta, která bude provádět manipulaci s daty, přijímat příkazy, vysílat odpovědi a také ovládat foťák.
Od této komponenty požadujeme:
- robustní řešení
- stabilita
- minimální hmotnost
- nízká spotřeba
- velký rozsah operační teploty
- standardní řešení i softwarové vybavení
Existují v podstatě 2 varianty, jak k problému přistupovat:
- vyvinout vlastní desku a vybrat si vlastní mikroprocesor
- použít existující platformu
Obě varianty mají svoje výhody, ale jít cestou vlastního vývoje desky je jistě těžší. U našeho projektu jsou k řešení desítky problému a tak je zde vhodné využít ověřené a spolehlivé platformy, které již existují.
Martin Sekera, člen týmu, doporučil z vlastní zkušenosti platformu Arduino.
Existuje dokonce český distributor této platformy, obchod HW Kitchen.
Nejprve jsme uvažovali o variantě Arduino Duemilanove with ATmega 328.

Je to osvědčená platforma založená na procesorech Atmel ATMega. Hmotnost celé desky je krásných 27g. Má 14 digitálních vstupů/výstupů, ale pouze jeden jediný hardwarový seriový port. Celá deska tiká na 16MHz a programuje se pomocí vestavěného USB portu a Arduino Software, který je volně k dispozici pro stažení na všechny pc platformy (Windows, Linux, Mac).
Rozhodl jsem se napsat panu Ing. Oldřichu Horáčkovi z obchodu HW Kitchen. Projekt jsem mu představil a zeptal se na možnost podpory, sponzoringu. Panu Horáčkovi se projekt velmi líbí a tak s poskytnutím Arduino platformy můžeme počítat! Skvělá zpráva!
V následujících dnech jsem si ale uvědomil, že s jediným hardwarových seriovým portem bude potíž, protože pro naše další komponenty budou potřeba ještě alespoň 2 další.
Jistě, seriové porty se dají emulovat softwarově za pomoci klasických I/O pinů, ale je to také zdroj možných potíží, které si ve výšce 30km nemůžeme dovolit.
Problém by vyřešila varianta Arduino MEGA with ATmega 1280. Má totiž 4 hardwarové seriové linky a také mnohem více digitální I/O pinů. Je nepatrně větší a těžší, ale podstatně dražší.
Pan Horáček nakonec doporučil Seeeduino Mega V1.1 Assembled. Je to odnož založená na Arduino Mega, jenom je menší, lehčí a levnější.

Pro další vývoj tedy počítám s touto deskou a platformou Arduino. Děkujeme obchodu HW Kitchen za poskytnutí této desky!

Arduino Software
Tags: arduino, flight control, hwkitchen, mozek, rizeni, seeeduino


